Consider the update procedure at the algorithm above, for a fixed t2.
z∼p(z):a batch of prior sampesx∼p∗(x):a batch of real data pointsgw(xi,zi)←∇w(fw(xi)−fw(gθ(zi))gˉw=m1i=1∑mgw(xi,zi)+N(0,σn2cg2I)w(t2+1)=w(t2)+Gradient Descentw(t2+1)=clip(w(t2+1),−cp,cp)
Since the procedure above produces a new output w(t2+1) with the dataset D and an auxiliary input w(t2) and noise structure, it can be regarded as an algorithm, and write as
Ap(D)=M(aux,D)
Thus, we can define the privacy loss for M as follows.
Under the condition of Algorithm 1, assume that the activation function of the discriminator has a bounded range and bounded derivatives everywhere: σ(⋅)≤Bσ,σ′(⋅)≤Bσ′, and input space is compact so that ∥x∥≤Bx. Then, gw(x(i),z(i))≤cg for some constant cg.
Remark. ReLU, Softplus activation functions are unbounded, but guarantees the boundness since the compactness of input space affects on the compactness of the function values.
Lemma 2
Given the sampling probability q=Mm, the number of discriminator iterations in each inner loop nd and privacy violation δ, for arbitrary ϵ>0 the parameters of discriminator guarantee (ϵ,δ)-privacy w.r.t. all the data points used in that outer loop if we choose:
σn=ϵ2qndlog(δ1)
Proof. See paper
Theorem
The Algorithm 1 learns a generator which guarantees (ϵ,δ)-DP.
References
Xie, L., Lin, K., Wang, S., Wang, F., & Zhou, J. (2018). Differentially Private Generative Adversarial Network (arXiv:1802.06739). arXiv. https://doi.org/10.48550/arXiv.1802.06739
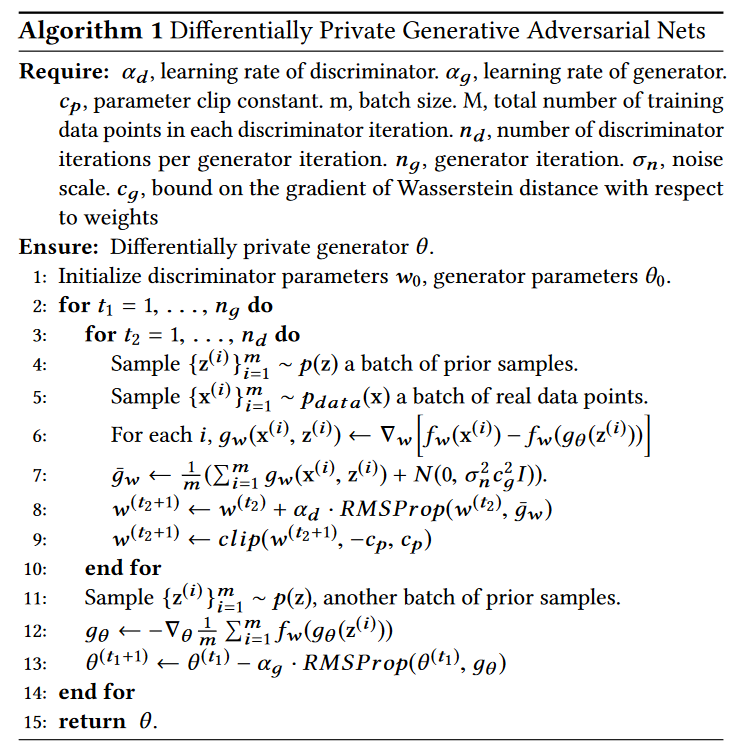 DPGAN Algorithm
DPGAN Algorithm