공간 데이터에서의 인과추론 : (3) 베이지안
저번 글에 이어, 이번 글에서도 공간 데이터의 인과추론에 대해 다루고자 합니다. 이번 글에서는 공간통계와 단짝이라고도 할 수 있는 베이지안 방법론을 기반으로 한 Spatial causal inference in the presence of unmeasured confounding and interference 논문을 소개합니다. 이 논문에서는 공간 인과 그래프spatial causal graphs를 도입하여 confounder 및 interference의 존재를 설명하고 있습니다. 또한, 공간적 의존성을 고려하지 않은 인과적 분석이 잘못된 결론을 초래할 수 있음을 보여주고, 이를 해결하기 위한 베이지안 모형을 제안합니다.
Spatial Causal Graphs
이 논문에서는 spillover effect를 고려하기 위해 다음과 같은 표기를 사용합니다. 우선, 처치변수 $Z$가 $0,1$의 값만을 갖는 이진 변수이며 두 개의 unit이 존재하는 경우($i,j$)를 고려합시다. 이때 $Y_i$는 $i$번째 unit의 결과변수를 나타내는데, 구체적으로는 다음과 같이
\[Y_i(z_i,z_j)\]로 표기합니다. 이는 $i$번째 개체의 결과변수가 $i$번째 개체의 처치변수 $Z_i$ 뿐만 아니라 다른 위치에 있는 $j$ 개체에 의해서도 영향을 받을 수 있음을 나타냅니다. 이러한 상황을 spatial interference라고 하며, 이는 SUTVA 가정의 no interference 조건을 위반하는 것이기도 합니다.
또한, 다음과 같이 지역 효과local effect $\lambda_i$와 간섭 효과interference effect $\iota_{ij}$를 도입합니다.
\[\begin{align*} \lambda_i(z) &= \mathbb{E}[Y_i(z_i=1, z_j=z_j)] - \mathbb{E}[Y_i(z_i=0, z_j=z_j)] \\ \iota_{i}(z) &= \mathbb{E}[Y_i(z_i=z, z_j=1)] - \mathbb{E}[Y_i(z_i=z, z_j=0)] \end{align*}\]Observed pair data and causal identifiability
이 논문에서는 관측된 데이터가 쌍(pair) 형태로 주어졌다고 가정합니다. $\mathbf{Z}=(Z_1, Z_2)$와 $\mathbf{Y}=(Y_1, Y_2)$로 이루어진 쌍 데이터는 각각 처치변수와 결과변수를 나타내고 공변량 $\mathbf{U}=(U_1, U_2)$는 unmeasured confounder로 가정합니다. 이때, 다음과 같이 두 성질을 가정합니다.
-
No unmeasured confounding
\[\mathbf{Z} \perp Y_i(z_1,z_2) | \mathbf{U}\] -
Ignorability
\[P_{\mathbf{Z}|\mathbf{u}}(\mathbf{z}|\mathbf{U}=\mathbf{u}) > 0\]
Causal DAG for spatial data
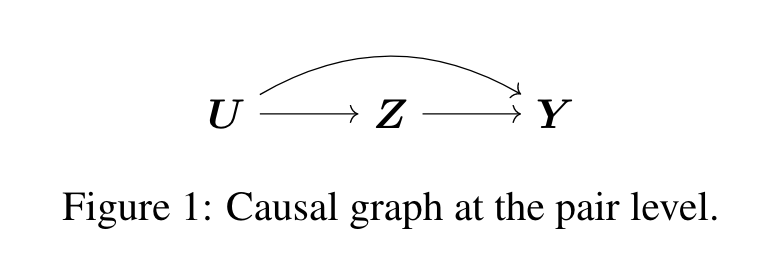
DAG는 인과관계를 설명하는데 효과적인 도구입니다. 이 논문에서는 공간적 의존성을 고려하기 위해 DAG를 기반으로 한 spatial causal graph를 도입합니다. 우선, pair 단위의 변수 $\mathbf{Z}, \mathbf{Y}, \mathbf{U}$에 대해서는 다음과 같은 DAG를 고려합니다.
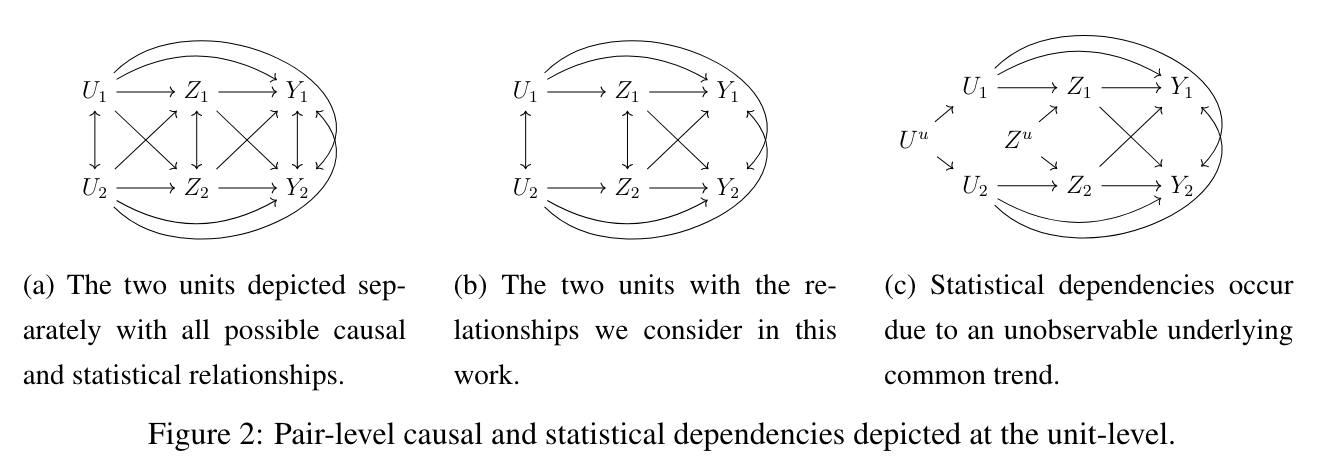
그런데, 공간 데이터 관점에서 살펴보면 아래와 같이 세 가지 경우를 생각할 수 있습니다. 이 논문에서는 두번째 경우인 (b)를 상정하며, 여기에서는 공간 간 간섭이 각 변수 수준에서는 존재하고 (양쪽방향 화살표), 간섭 효과($Z_{1}\to Y_{2}$ 등)이 존재하지만 confounder 수준에서의 간섭효과($U_{1}\to Z_{2}$)는 존재하지 않는다고 가정합니다. 또한, confounder 변수 $\mathbf{U}$ 내에서의 공간 종속성이 존재하고($U_{1}\leftrightarrow U_{2}$) 이를 spatial confounding이라고 합니다.
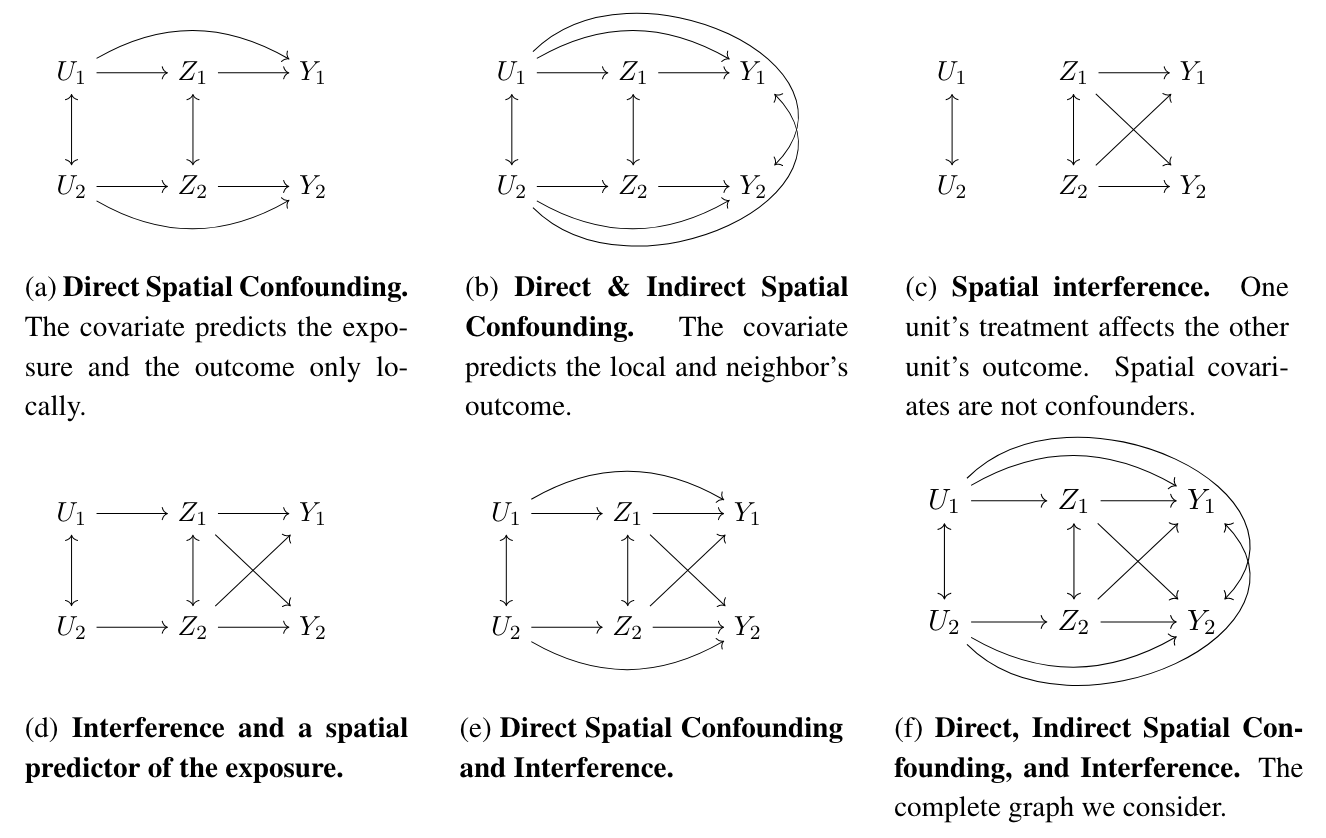
구체적으로는, (b)의 가정 상황에 대해 다음과 같이 6가지의 시나리오들을 고려할 수 있습니다. 각각의 시나리오에 대한 설명은 논문을 참고하면 될 것 같습니다.
Causal Inference
위에서는 공간 데이터에 대해 인과모형을 어떤 구조로 가정할지에 대해 이야기했다면, 이번에는 구체적으로 데이터로부터 인과효과를 추정하는 과정에 대해 살펴보도록 하겠습니다.
Structural Equation Framework
인과효과의 추정을 위해 다음과 같이 SEMStructural Equation Model, 구조방정식 모델을 사용합니다.
\[Y_{i}(z, \bar{z}) =f_{1}(z,\bar{z}) + f_{2}(\tilde{C}_{i}) + f_{3}(U_{i}, \bar{U}_{i}) + \epsilon_{i}(z,\bar{z}) \tag{1}\]여기서 전체 개체(unit)의 수는 $i=1,\ldots,n$이고 \(\tilde{C}_{i}\)는 $i$번째 개체의 $p$개 공변량 \((C_{i1},\ldots,C_{ip})\)를 나타냅니다. 또한, $\bar{z}$는 다음과 같이 정의됩니다($\bar U$도 마찬가지로 정의).
\[\bar{z}_{i} = \sum_{j=1}^{n} A_{ij}z_{j} / \sum_{j=1}^{n} A_{ij}\]여기서 $A_{ij}$는 $i$번째 개체와 $j$번째 개체 간의 공간적 관계를 나타내는 adjacency matrix입니다. Areal data의 경우는 두 개체가 인접한 경우에 $A_{ij}=1$로 설정하고, 그렇지 않은 경우는 $A_{ij}=0$으로 설정하는 것이 일반적이며, point data의 경우는 두 개체간의 거리로 $A_{ij}$를 정의할 수 있습니다. 즉, 이는 인접한 요인들의 가중평균을 나타냅니다. 또한, 오차항 $\epsilon_{i}(z,\bar z)$는 서로 독립이고 평균이 $0$, 분산이 $\sigma_{Y}^{2}$인 분포를 가정합니다.
위 SEM (1)에서 각 함수에 선형 형태를 가정한다면(가장 일반적인 구조방정식 가정), 식 (1)은 다음과 같이 간단하게 표현됩니다.
\[Y_{i}(z,\bar z) = \beta_{0}+\beta_{Z}z + \beta_{\bar Z}\bar{z} + \tilde{C}_{i}^{T}\boldsymbol{\beta}_{C}+ \beta_{U}U_{i} + \beta_{\bar U}\bar U_{i}+\epsilon(z,\bar z)\]이때, $\beta_{Z}$는 local effect, $\beta_{\bar Z}$는 interference effect에 각각 대응됩니다. 구체적으로, local effect $\beta_{Z}$는 이웃 개체들의 처치가 고정된 상태에서 $i$번째 개체의 처치가 결과변수에 미치는 영향을 나타내고, interference effect $\beta_{\bar Z}$는 $i$번째 개체의 처치가 고정된 상태에서 이웃 개체들의 처치가 결과변수에 미치는 영향을 나타냅니다.
Bayesian Causal Inference
앞선 구조방정식 기반 모델에서는 만일 측정된 공변량covariates들이 충분하지 않아 confounding adjustment, 즉 공변량이 주어진 경우에서의 조건부 독립성이 충족되지 않을 경우 추정된 인과효과에 편향bias이 발생하게 됩니다. 이를 해결하기 위해 논문에서는 베이지안 인과추론을 도입하여 공간 구조에서의 인과추론을 수행합니다. 베이지안 인과추론은 관측되지 않은 potential outcome(한 개체가 처치 집단에 속한다면, 그 개체가 처치되지 않은 경우의 결과값)을 결측치missing data로 보고 사후분포를 바탕으로 인과효과를 추정합니다.
앞선 세팅에서 추가로, $\mathbf{Y}(\cdot) = {\mathbf{Y},\mathbf{Y}^\text{miss}}$를 설정하는데 이는 관측된 결과변수 $\mathbf{Y}$와 관측되지 않은 결과변수(결측치) $\mathbf{Y}^\text{miss}$ 의 모임입니다. 이때 결측치의 사후분포는 다음과 같이 계산할 수 있습니다.
\[p(\mathbf{Y}^{\text{miss}} \mid \mathbf{Y},\mathbf{Z},\overline{\mathbf{Z}}, \mathbf{C},\theta) \propto P(\mathbf{Z,\overline{Z}}\mid\mathbf{Y}(\cdot), \mathbf{C},\theta)P(\mathbf{Y}(\cdot)\mid \mathbf{C},\theta)P(\mathbf{C}\mid \theta)\]이때 $\theta$는 모델에 사용된 모수parameter를 의미합니다. 여기서 주의할 점은, ignorability 가정이 측정된 공변량 $\mathbf{C}$로만은 성립하지 않기 때문에 이 경우 treatment assignment mechanism $P(\mathbf{Z,\overline{Z}}\mid\mathbf{Y}(\cdot), \mathbf{C},\theta)$ 을 위 식 (2)에서 분리할 수 없습니다. 따라서, 결측치만의 사후분포 대신 다음과 같이 전체 데이터에 대한 결합분포를 우선 고려합니다.
\[p(\mathbf{Y}(\cdot),\mathbf{Z,\overline Z}, \mathbf{C}) = \int p(\mathbf{Y}(\cdot)|\mathbf{Z}, \mathbf{C}, \mathbf{U},\theta^\ast) p(\mathbf{Z}|\mathbf{C,U},\theta^\ast)p(\mathbf{U}|\mathbf{C},\theta^\ast)d\mathbf{U} p(\theta^\ast) d\theta^\ast\]여기서 $\overline{\mathbf{Z}}$는 $\mathbf{Z}$의 평균으로 정의되었기 때문에, $\mathbf{Z}$에 의해 유일하게 결정되므로 위 식에서 제거되었고 $\theta^\ast$는 $\theta$와 $\mathbf{U}$의 모수들을 모두 포함하는 모수입니다.
앞서 살펴본 SEM 식 (1)에서는 서로 다른 개체들의 결과변수들이 나머지 정보가 주어진 경우 독립적으로 가정했으므로 위 식은 다음과 같이 unit-wise로 나누어 표현할 수 있습니다.
\[\begin{align*} p(\mathbf{Y}(\cdot)|\mathbf{Z}, \mathbf{C}, \mathbf{U},\theta) &= \prod_{i=1}^{n} p(Y_{i}(\cdot)|Z_i, \bar Z_i, \tilde C_i, U_i, \bar U_i,\theta)\\ &= \prod_{i=1}^{n} p(Y_{i}(\cdot)|\tilde C_i, U_i,\bar U_i,\theta) \end{align*}\]결과적으로 앞선 결합분포$ \(p(\mathbf{Y}(\cdot),\mathbf{Z,\overline Z}, \mathbf{C})\)는 다음과 같이 표현할 수 있습니다.
\[\int \left(\prod_{i=1}^{n} p(Y_{i}(\cdot)|\tilde C_i, U_i,\bar U_i,\theta)\right) p(\mathbf{Z}|\mathbf{C,U},\theta)p(\mathbf{U}|\mathbf{C},\theta)d\mathbf{U} p(\theta) d\theta\]위 식으로부터 얻을 수 있는 인사이트는, 관측되지 않은 공변량 $\mathbf{U}$가 treatment assignment mechanism $P(\mathbf{Z}\mid\mathbf{C,U},\theta)$에 영향을 미치기 때문에, 이 역시 베이지안 모델에 포함되어야 한다는 것입니다. 즉, 단순히 결과 모델에 spatial random effect를 도입하는 것으로는 충분하지 않으며, treatment assignment mechanism에도 spatial random effect를 도입해야 한다는 것입니다.
Exposure-confounder assumptions
이를 해결하기 위해 논문에서는 다음과 같은 분포 가정을 제안합니다.
\[\begin{pmatrix} \mathbf{U} \\ \mathbf{Z} \end{pmatrix} \mid \mathbf{C} \sim \mathcal{N}_{2n} \left( \begin{pmatrix} \mathbf{0}_n \\ \gamma_0 \mathbf{1}_n + \mathbf{C}\boldsymbol{\gamma}_C \end{pmatrix}, \begin{pmatrix} G & Q \\ Q^T & H \end{pmatrix}^{-1} \right)\]여기서 $Q$는 대각행렬로 원소 $q_i=-\rho\sqrt{g_{ii}h_{ii}}$로 정의됩니다. 이로 인해 $\mathbf{U}$와 $\mathbf{Z}$는 서로 독립적이지 않지만, precision matrix를 통해 조건부 독립을 만족합니다. 즉, 다음이 성립합니다.
\[Z_i \perp \mathbf{U}_{-i} | U_i, \mathbf{Z}_{-i}, \mathbf{C}\]여기서 $\mathbf{U}_{-i}$는 $i$번째 개체를 제외한 나머지 개체들의 공변량을 의미합니다. 이러한 조건부 독립이 precision matrix에서 $Q$를 대각행렬로 가정하며 유도된 것입니다.
또한, 실제로는 처치변수 $\mathbf{Z}$에 대해 하나의 데이터셋만을 관측할 수 있기 때문에, precision matrix $G$와 $H$를 추정하기 위해서는 추가적인 구조 가정이 필요합니다. 여기서는 다음과 같이 파라미터들을 설정합니다.
\[\begin{align*} G &= \tau_U^2 (D-\phi_U A) \\ H &= \tau_Z^2 (D-\phi_Z A) \\ \theta_U &= (\tau_U^2, \phi_U) \\ \theta_Z &= (\tau_Z^2, \phi_Z) \end{align*}\]여기서 $D$는 대각행렬로 원소 $d_{ii}=\sum_{j=1}^{n} A_{ij}$로 정의됩니다. 물론 precision matrix의 모델이 위와 같이 반드시 설정되어야 할 필요는 없지만, 위는 일반적으로 공간통계에서 Gaussian Markov random field를 다룰 때 사용되는 형태의 모델입니다.
이러한 설정을 통해, MCMC나 VIVariational inference 등 베이지안 추론 방법을 사용하여 local effect $\beta_{Z}$와 interference effect $\beta_{\bar Z}$를 추정할 수 있습니다. 구체적인 모형은 논문을 참고하시면 좋을 것 같습니다.
References
- G. Papadogeorgou and S. Samanta, “Spatial causal inference in the presence of unmeasured confounding and interference,” Feb. 02, 2024, arXiv:2303.08218. doi: 10.48550/arXiv.2303.08218.
Leave a comment